Overview
The primary contributions of this paper are as follows:
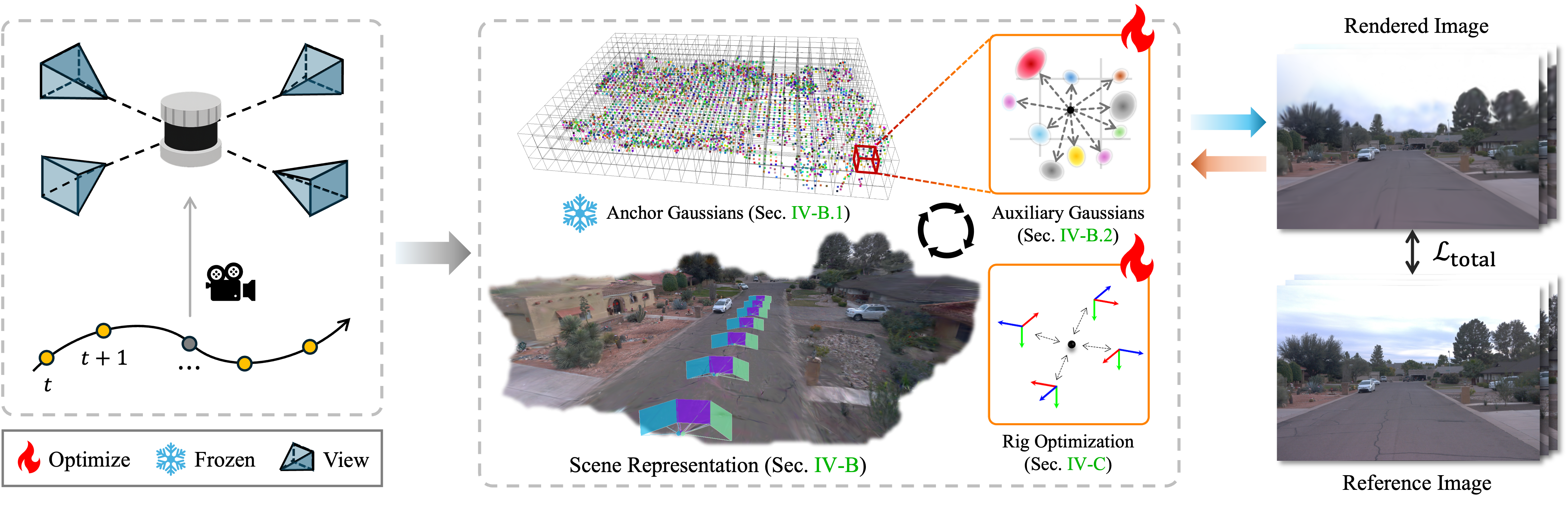
- We ensure metric scene scale by designating reliable LiDAR points as anchor Gaussians to preserve overall scene structure, while auxiliary Gaussians regularize local geometry under challenging initialization.
- We integrate adaptive voxel control and Gaussian scale regularization to reduce redundant anchor Gaussians and suppress over-dominant anisotropic Gaussians that hinder optimization stability.
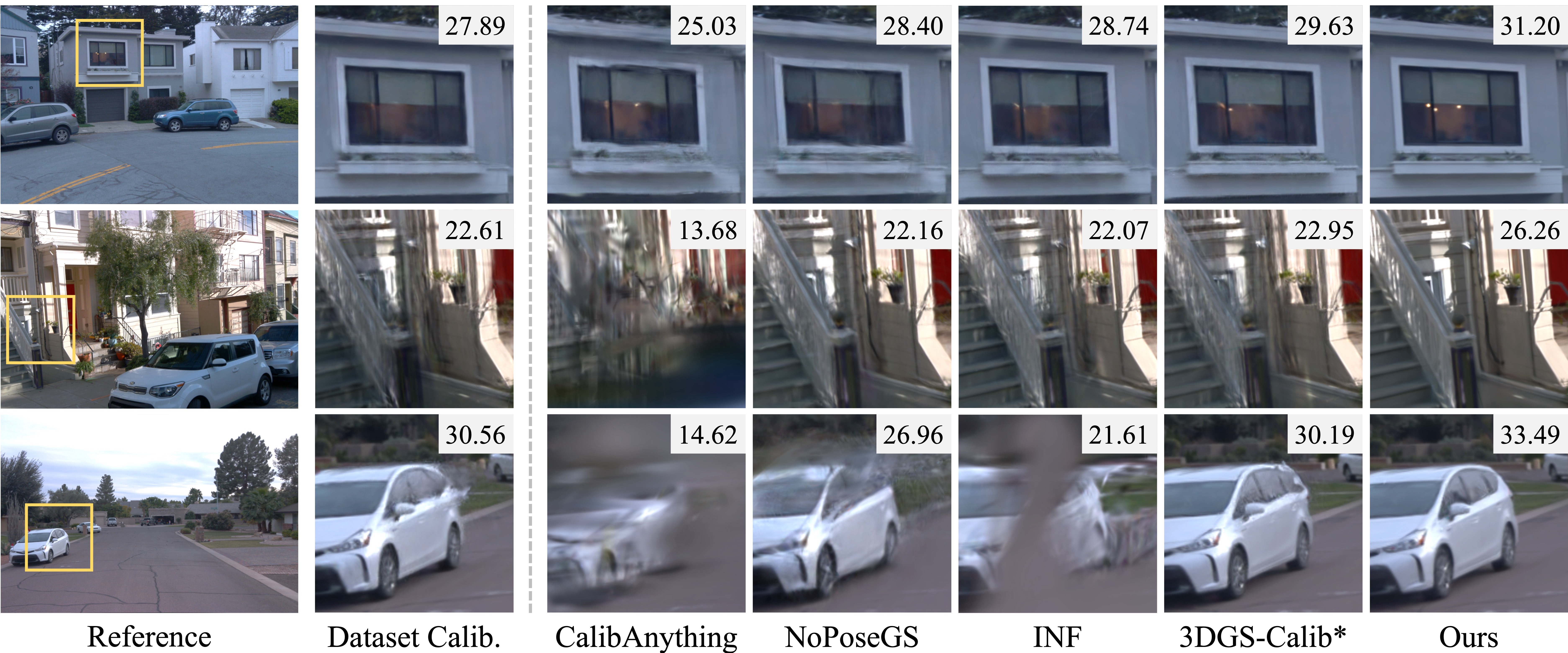
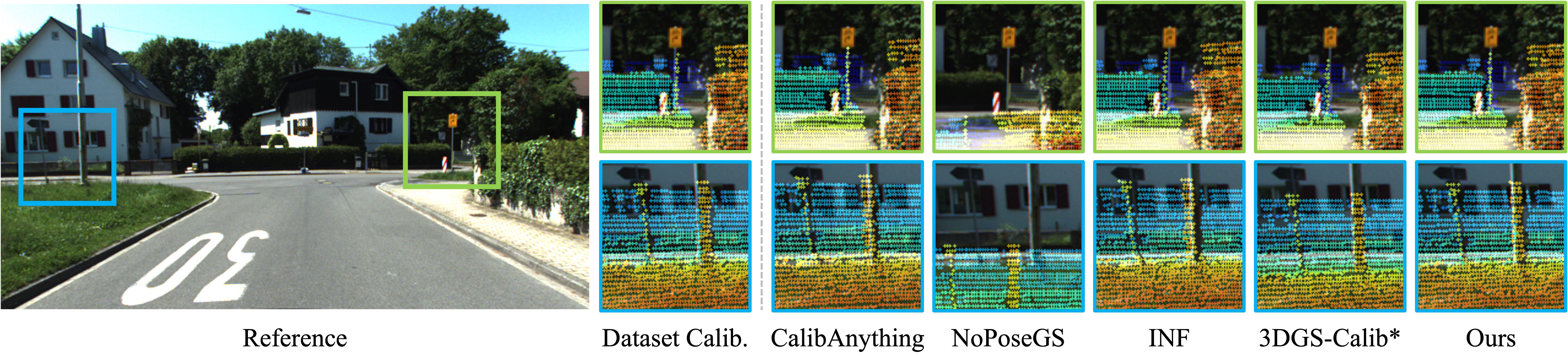
- We validate our approach on three real-world setups, including two autonomous driving datasets and a handheld solid-state LiDAR setup, demonstrating strong generalization, high calibration accuracy, and rendering quality.